The Canada-Wide Science Fair (CWSF) is the country’s largest annual youth science, technology, engineering and mathematics (STEM) event, bringing together top young scientists and their projects, selected by our national network of over 100 regional STEM fairs in every province and territory. The weeklong event has 500 finalists in grades 7-12 competing for medals, cash prizes, scholarships and exclusive opportunities.
in 2021, Silas competed at the CWSF and he was awarded the Excellence in Astronomy Award (the prize is a telescope) and a Gold Medal! – Here at DSS we are so proud of him.
Silas’ project “Revolution Evolution” describes the design evolution of a CubeSat reaction wheel.
“For last year’s
science fair project, SMARTEN, I created a simulated microgravity and reduced
friction testbed for CubeSats. I got interested in reaction wheels
because I needed to build one to test SMARTEN. That project led to me being invited
to join DSSL’s LORIS program and that work was the motivation for my science
fair project this year.”
“My main goal is to provide a versatile alternative to commercial reaction wheels so that organizations with limited budgets can expand the types and number of missions they can pursue.”
What are the current outcomes?
I qualified for the Youth Science Canada Nova Scotia Regional competition after winning his school’s science fair. The regional competition was held this past week and I was selected as one of the 6 students to represent Nova Scotia at the National event to be held May 17-21.
I received some useful feedback from the judges and will be incorporating a few small changes to his project. (A bit more testing!) I am excited to be part of team Nova Scotia, and am hoping to make the LORIS team proud too.
In our April spotlight, we chat with Maxwell Power, the ADCS lead for the LORIS Mission. Max has been busy leading the ADCS and took over the subsystem more than a year ago. Maxwell keeps in touch with all the members of his subsystem including the mechanical and electrical designers to ensure this subsystem’s milestones are reached.
Maxwell Power, ADCS Team Lead, DSS – LORIS Mission
Where are you from and why did you choose to study at Dalhousie?
I am from Halifax, Nova Scotia and I chose to study at Dalhousie because it
offers a great engineering program and is in the Maritimes.
What you’re
studying?
I am studying Mechanical Engineering.
How did you come
to study your field/why are you interested in it?
I entered Mechanical Engineering because I have a passion for designing dynamic
systems such as robots and remotely operated vehicles. With both my parents
being Mechanical Engineers, I have had a lot of experience seeing what is
involved in the field and have grown up having a pretty good idea of what I
want to do.
What is your
subsystem for LORIS and does it do?
I am the Team Lead for the Attitude Determination and Control System (ADCS)
group as well as the Reaction Wheel Subcommittee. The ADCS subsystem uses
magnetic field sensors, sun sensors, and a gyroscope to determine the pointing
direction of the satellite and actuates magnetorquers and reaction wheels to
de-spin and orient the satellite in the desired direction.
How did you come
to be involved in the lab?
Back in 2019, I reached out to Arad and from that point on, I have continued to
become more involved with the project.
What is the thing
you’re most excited about for the LORIS mission?
I am currently very excited to see the reaction wheels coming together and
cannot wait to watch them spin-up for the first time. What excites me the most
is knowing that there is going to be a satellite soaring above Earth that we
all had a part in making.
One of the most involved and active members of the LORIS mission is our very own Nick Popp. Nick is heavily involved with two of our subsystems , and even helps other teams when they need help with all things mechanical related. He has done some instrumental Finite Element Modeling (FEM) and Thermal simulation, and we are very glad to have him. In this month’s issue of Spotlight, we will chat with Nick.
In this post, we will get to chat with Kenzie Timmons, the mechanical subsystem lead for the LORIS Mission. Kenzie has done an amazing job leading the mechanical subsystem that includes design and development of the chassis and integration and assembly of the final bus. Like all the other subsystem, this is complicated stuff and it takes great leadership to make sure everything is up to code.
Kenzie Timmons, DSS Mechanical Subsystem Lead, holding a model of the LORIS Satellite
Where are you
from and why did you choose to study at Dalhousie?
I
am originally from Inverness Nova Scotia but grew up in New Glasgow Nova
Scotia. Dalhousie is just the natural progression for Engineers in Nova Scotia,
I completed my first two years at Acadia University.
What you’re
studying?
I
am currently in my 4th year of Mechanical Engineering with Coop.
How did you
come to study your field/why are you interested in it?
I
have always loved math and physics but hate the theoretical nature behind them
once you get advanced enough within each. As a kid I enjoyed creating things
and for a long time I had no idea the exact study I wanted to do, but I
knew I wanted to use math and physics in real-world situations. It was not
until I learned that engineering is also called applied science that I started
looking further into the discipline. After learning that engineering is simply
using every science to create things that seem impossible, I knew it was
exactly what I was going to pursue.
What is your
subsystem for LORIS and does it do?
I
am the team lead for the Mechanical Subsystem within LORIS. Originally the
Chassis team, we handled the design of the metal framework that holds
everything together and ensured it met all requirements for deployment and
survival in space. As the project went on, Chassis became too specific for
the work we do. We now handle the modeling of all subsystems and created the
mechanical standards to follow within LORIS, we analyze both the structural and
thermal stresses of the entire satellite, and we design all testing
apparatus required by other subsystems. I like referring to us as the skeleton
that keeps everyone together!
How did you come to be involved with DSS?
In
Fall 2019 I got an email sent to all 3rd year mechanical engineers
seeking new individuals sent on behalf of the previous Chassis Lead. He gave me
an intro task and a week to model a keychain. I completed the task that
evening as I was too excited to wait, the next day I was on the team! Our lead
only had 4 more months until graduating, so along with my first task of
modeling the payload, the team was also instructed to think of a new lead. I
stepped forward, thinking I had no chance as I was only on the team for a
week, though turns out I was the only one to step forward! I spent the rest of
the semester making sure I get as much information as possible and it was in
that time, I truly found a love for LORIS and the work we do on this
team.
What is the
thing you’re most excited about for the LORIS mission?
Everything!
I, like many others, am a part of this mission because it is something I enjoy.
I get to join in on the general meeting every week and be in awe at how quickly
I get lost when software starts talking about their code, or OBC setting
up remote access and virtual sims, or Power talking about circuitry, only to
have them get lost when I start talking mechanical. DSS is full of amazing
minds and I get to see them in action every week.
After more than four years of work, LORIS made by students with the Dalhousie Space Systems Lab has been launched into orbit.
LORIS, which stands for low-orbit reconnaissance imagery satellite, was deployed by Nanoracks from the International Space Agency (ISS)
It was one of dozens of satellites that were part of the Canadian CubeSat Project and the first made in Atlantic Canada.
Funding
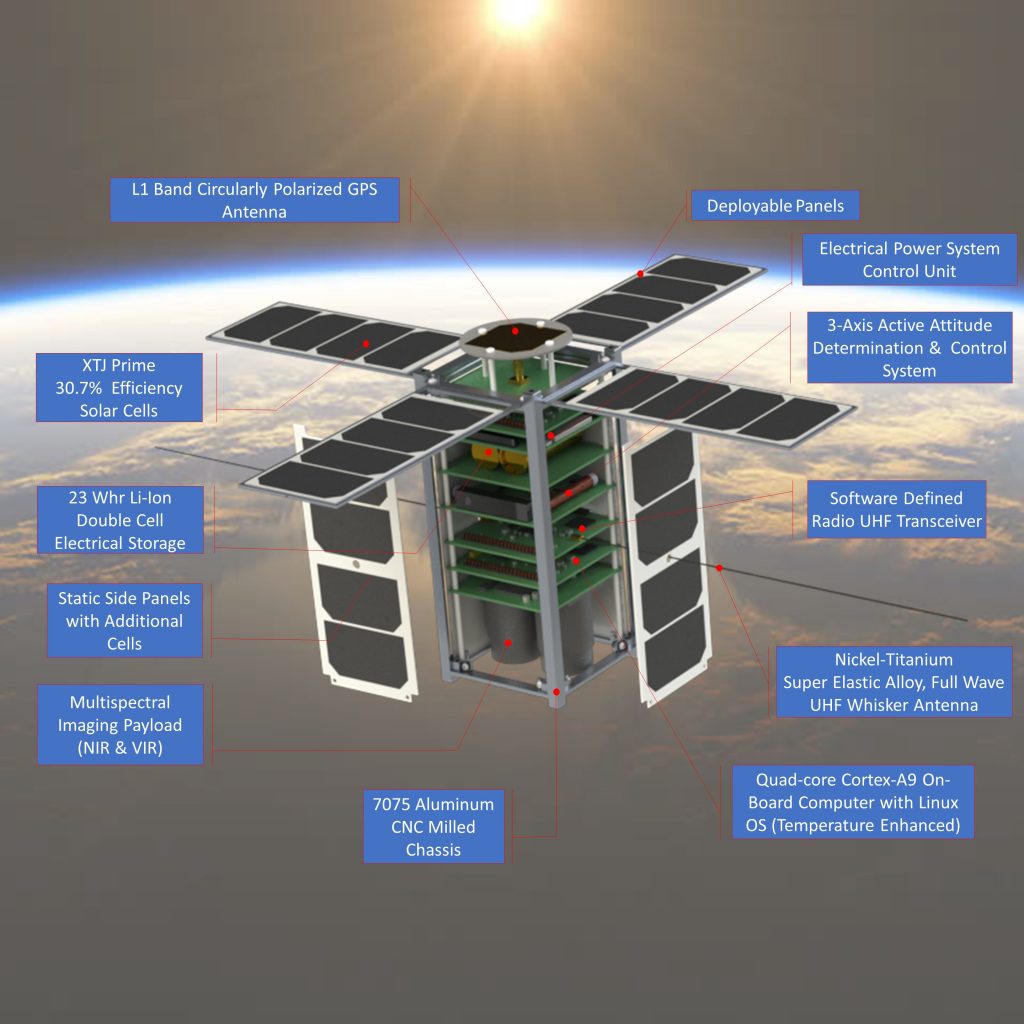
In May of 2018, the Dalhousie Space System Lab (DSS) was awarded $200,000 by the Canadian Space Agency (CSA) to design and build a CubeSat to pursue space related research topics. The name of the CubeSat is LORIS. It has multi-spectral imagery and high frequency up-link / down-link capabilities.
Upon completion in 2021, LORIS will be launched into orbit from the International Space Station.
What is a CubeSat
What is LORIS?
The Dalhousie Space Systems Lab’s main project is designing and building a CubeSat called LORIS, which stands for Low Orbit Reconnaissance Imagery Satellite. The DSS’s goal is for the LORIS to be the first CubeSat from Atlantic Canada to be launched by the Canadian Space Agency.
LORIS is in fact two CubeSats put together in one frame. While in space, LORIS will use specialized cameras to develop a fully detailed view of the Nova Scotia peninsula and surrounding waters. The results will be used to study and monitor shorelines and ocean life activity. LORIS is scheduled to be launched by 2021 from the International Space Station.
LORIS Mission Objectives
LORIS mission is not just a multidisciplinary project. LORIS was formed to foster education and create a platform for engineers, scientists and all interested students and researchers to work together, and build something that was not attempted before in our province. LORIS has two objectives
Primary:
1. Educating students in
space systems engineering and satellite design.
2. Technological
demonstration of various satellite subsystems.
3. Establish and grow a radio amateur club at
Dalhousie University that will be responsible for ground station operation as
well.
4. Broadcasting the
satellite telemetry on a fixed interval providing an opportunity for amateur
operators to interact with the satellite worldwide.
Secondary:
1. Successfully operate the
payload and return images of NS to the ground station.
2. Provide the opportunity
for amateur radio operators to make radio contact with the satellite.
3. Use the ground station at
Dalhousie University to engage and introduce students to an amateur radio club.
4. To collaborate with Halifax ARC (VE1MR) to train and certify radio operators annually.
5. Provide direct ground station access to Halifax ARC members to interact with the satellite.
If you are a member of Radio Armature Canada (RAC) club or interested in armature radio operation, please reach out to us. We have a large number of RAC members helping us with the project, and we are constantly looking to expand our team of support.
Project Team
LORIS has reached more than 100 members supporting the project from every aspect. Our members work passionately and tirelessly to ensure LORIS will catch its flight to LEO in 2022 on-time. To see the list of people who made LORIS a reality check the Mission Team page
Credit: Dalhousie Space System
Technical Specifications
LORIS is a 2U CubeSat class satellite. For detail chassis drawing, please refer to the Chassis Engineering Drawing document. The file could be accessed using the link below
LORIS’s mandate is to support and expand the global network of Amateur Radio Operators. LORIS is using a 430 MHz UHF band to uplink and downlink information. Although uplinking to the satellite is restricted to the Dalhousie Space System Lab, Satellite Operators, the downlink is globally available. LORIS will orbit the Earth approximately 16 times per day, covering a large percentage of the globe. This section will continually update to provide the most relevant information, including center frequency, modulation scheme, call signs and other relevant information. Radio operators globally can interact with LORIS by downlinking its telemetry on 5 min intervals
Please consult the RLB in the above section for the most up-to-date Radio Link details.
GND Station Call Sign: VA1DSS
Center Freq: TBD
Bandwidth: TBD
Modulation: GMSK
Downlink Encryption: N/A
Integration
LORIS was integrated into Nanoracks deployer on July of 2022 at the CSA’s headquarters, located at the John H.Chapman Space Centre in Longueuil, Quebec, and was shipped to Houston, TX.
Launch
LORIS was launched aboard CRS-26 from Kennedy Space Center to the ISS on Nov. 26, 2022, then deployed to low earth orbit on Dec. 29, 2022
Credit: NASA
LEOP
As of April 2023, LORIS has been orbiting. As expected, the solar wings have induced significant drag on the trajectory, resulting in rapid descend of the spacecraft. It is expected that LORIS will de-orbit by Summer of 2023.
Current Status: For UpToDate TLE and Decay information visit N2YO link
Sponsors
Special thanks to our local sponsors
This project was made possible by the financial contribution of the Canadian Government and the Canadian Space Agency (CSA) Canadian CubeSat Project (CCP)
The spacecraft division of the DSS is in charge of designing and building the satellites that go into orbit. Responsible for all aspects of hardware and software development, the spacecraft division is also in charge of mission planning before the satellites are built, operation of the satellite during orbit, and management of data during and after mission completion. From the first component made, to ensuring the satellite burns up in orbit upon completion of its mission, the spacecraft division is in charge of various crucial tasks.
Rocketry Division
Official Patch – DSS Rocketry Division
The rocketry division’s goal is to research and understand how rocket flights work. Achieved by collecting data form test launches, the DSS using this information for future development and launches of rockets. They develop rocket shells, test payloads, electronic systems and propulsion systems. Understanding this complex flight data is key when designing and developing rockets for launch.
Mars Analog Division
Official Patch – DSS Analog Division
Developing self-sufficient rovers for Mars & Lunar missions with the Canadian Space Agency is the main goal of the Mars analog division. Currently, the division is focusing on the software that controls the rover. The division’s primary objective is to make a rover fully autonomous, meaning it can make decisions independently. In the future, the Mars analog division plans to build rovers from the ground up.
The Dalhousie Space Systems Lab (DSS) is a multidisciplinary team of highly motivated students and faculty from Dalhousie University focused on the research and development of satellites called CubeSats. These are square-shaped miniature satellite roughly the size of a Rubik’s cube that perform tasks in Earth’s orbit or space. The DSS also develops various space flight systems and manages operations.
Mission Statement
To be Atlantic Canada’s leading developer of spacecraft systems and components for future missions and satellite operations management.
Vision Statement
Spacecraft research, development, and satellite management from Atlantic Canada.
 DSS Spotlight
DSS Spotlight